
利用KUKA机器臂作为打印头,可在空间中沿不同路径打印曲线。其中,打印工具头采用了灵活可变的机械设计,共4个打印喷头,其中3个喷头可以有规律地一张一合,从而改变打印过程中线材定型时的截面形状,形成与蛛丝类似的具有结构强度的线材。
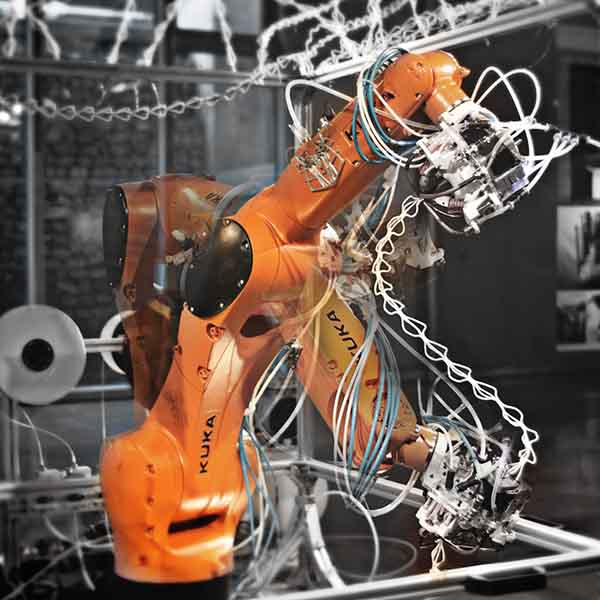
其主要由kuka机器人以及3D打印喷头构成,在六轴机器人按模型中的路径移动的同时,3D打印喷头进行打印,最终形成空间曲面。位于机器手臂末端的工具头,包含4个打印喷头,其中3个为活动喷头,由附加的电路以及机械装置控制,可在两个状态间隙摆动,沿着打印路径,固定的喷头可以完全拟合模型曲线,3个活动喷头则可以一张一合,形成特殊的截面形状打印摆动曲线,增强模型的结构强度。
打印前,要将机器人、工作头以及锚固平面处于精确的校准位置,而最外层的铝型材框架正好保证了这一点, 令整套装置更加具有系统性和完整性。
整套3D打印系统由独立的电路控制,包含供应装置、挤压运送装置、加热装置、速度/温度控制装置以及操作面板。此外,由于打印头工作时会产生大量的热量,为使打印线材即时凝固,装置还设计了冷却系统,用空气压缩机将气流持续大量的吹向打印喷头前端,使受热融化的ABS线材冷却定型。
KUKA六轴机器人承载3D打印喷头,可根据模型结构按照合理的路径进行3D打印,KUKA的运动则由线下编程完成,从而令空间打印与通用建模软件完美对接。














