
如今很流行用3D打印机来个人制作一些小型机器人。无论对于个人爱好者还是大型机器人开发者都存在一个共同的难题,就是如何让机器人的“手”像人手那样活动。
但耶鲁的科学家们不会轻易放过这一问题。在机械工程教授 Aaron Dollar的领导下,该校Openhand项目提出了一个非常出色的3D打印解决方案。他们的手型设计,不仅非常容易复制且成本低廉,而且能够制造出非常实用的“手”,它能紧紧抓住各种小型和大型物体——即便是平躺在桌子上的硬币它也能很容易地捡拾起来。而且尤其重要的是,它是开源的。

据耶鲁大学研究人员透露,他们的项目原本就是希望有更多的人使用它,设计人员希望藉此使机器人设计出现有机演变。“这个项目打算打造一系列开源手的设计,并通过开源用户群体的贡献,产生大量有用的设计修改和变化提供给研究人员。”他们写道。首先提上日程就是机器人手,它必须是多用途的,拥有适合反复使用的功能。“因此,这个项目开发的手,设计必须简约、坚固耐用,尤其要适合反复迭代和在非结构化环境中运行。”
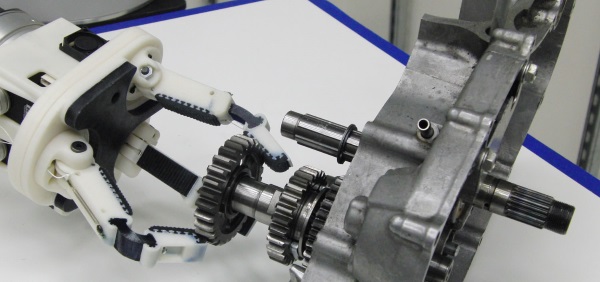
该机器人手的设计既简约又耐用。设计团队拿出了一种转盘式柔绳传动(tendon-driven)的欠驱动手指设计。“这种欠驱动(underactuated)手能够根据接触物体的表面进行自适应调整,实现简单的抓握,而无需传感器或复杂的反馈系统。这个设计范例将致动和手指元素分离开来,从而能够实现更大程度的定制。”
虽然这些设计可能很昂贵,耶鲁大学研究团队却用3D打印、树脂浇铸和一点点的手工制作很容易就完成了。基本上,他们用3D打印制造系列塑料手指兼制作树脂模具。这些空心模具用树脂浇铸成型,然后固化和切割,从而制造出机械手的“肌腱”和指垫。














