
三维激光扫描仪是利用激光的传播速度快,直线型好的特点将激光发射出去,并接收返回的信息来描述被测量物理的表面形态的。由于被测物体的反射率不同接收到的返回信息也有强弱之分。所谓的三维既是利用扫描仪的水平转动来覆盖一整片区域。这个过程很类似民间的360度全景摄影。区别就是我们得到的“底片”不是图像而是成千上万个点组成的表面形态,在测量术语中叫做点云。扫描的结果看似是一副图片,其实是由无数个激光点组成的。不同的颜色就是激光返回不同的反射率的表现。
三维扫描技术被广泛应用于机器人技术,甚至是GPS地理定位技术。但目前的三维扫描世界即将被颠覆,因为麻省理工学院的研究人员正在制作在300毫米晶圆上的激光雷达芯片,并且成本低到10美元。最重要的是,在这个设备中的非机械光束转向比目前所实现的机械激光雷达系统的速度快1000倍。

来源:3ders
更轻、更小、更好、更便宜
这种突破性的技术,由博士生Christopher V. Poulton 与其导师Michael R. Watts教授在IEEE对外公布的信息中所阐述,Michael R. Watts教授还正在与DARPA(美国国防高级研究计划局)的支持下研究光子的创新。他们认为,新的激光雷达芯片将颠覆当前的3D扫描市场,应用范围从机器人到车辆,再到可穿戴式传感器领域。
当前市场上大多数激光雷达系统(包括那些在自动驾驶汽车上所安装的雷达系统)使用的是离散自由空间光学元件,包括激光器、镜头和外部接收器。在这些硬件组合中,激光在震荡的同时旋转,这使得其扫描范围和复杂程度受到限制。并且成本从1000美元到70000美元不等。
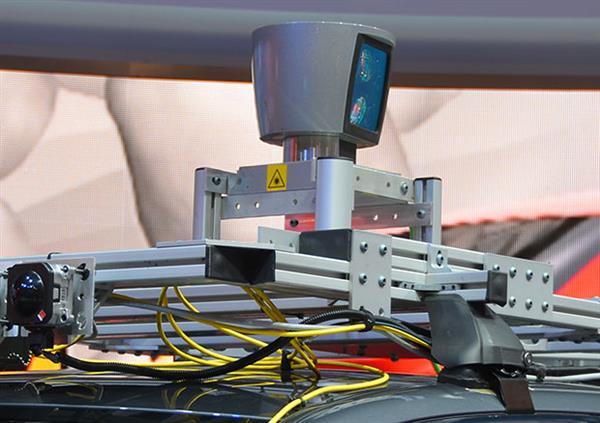
装载自动驾驶车上的Velodyne HDL-64 lidar激光雷达由机械装置旋转观测周围情况 ,图片来源:Evan Ackerman
麻省理工学院的激光雷达芯片更小、更轻、更便宜,也有可能是更强大的,因为芯片中没有移动部件,速度是目前的激光雷达系统的1000倍,可以用来跟踪高速移动的车辆。
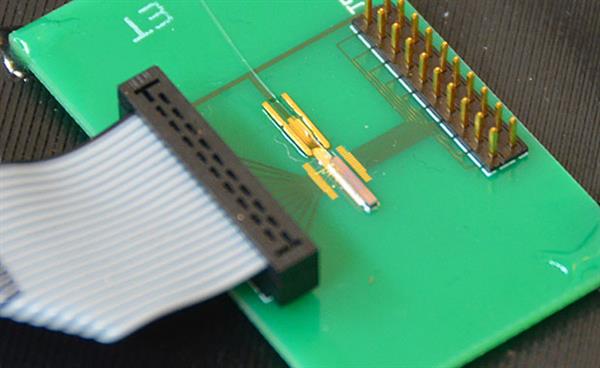
图片:麻省理工激光雷达的原型, 来源IEEE Spectrum
麻省理工学院的激光雷达芯片工作原理与硅光子技术密切相关,硅波导几的波长远小于光纤,这使得非常小的芯片上的光子电路具有类似于光学纤维的属性。该技术的商业化也并不昂贵,可以在大量的CMOS晶圆代工厂生产,并解决如波导损耗和光隔离的问题。
DARPA(美国国防高级研究计划局)对麻省理工的研究成果十分有兴趣,这些激光雷达芯片是尺寸为 0.5 mm x 6 mm的硅光子芯片,具有可控的发射和接收矩阵, 以及锗探测器。虽然激光还没有被集成,但已经被证明是可能的。
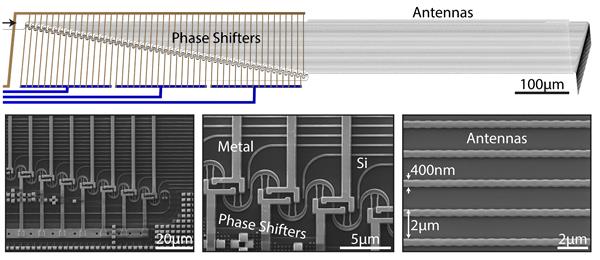
图片:麻省理工激光雷达的内部结构, 来源IEEE Spectrum
现在,这种低成本的激光雷达扫描仪可以探测到5厘米到2米之间范围内的对象,3D科学谷了解到麻省理工的目标是在一年内扩大到10米范围内。研究人员期望可以达到100米,甚至更远的可能性。目前唯一的问题有限的转向范围为51度,克服这个有限的转向范围是具有挑战性的,但是研究人员认为100度的角度应该是可以实现的,这意味着通过多个传感器可以很容易获得一个完整的360度的图像。
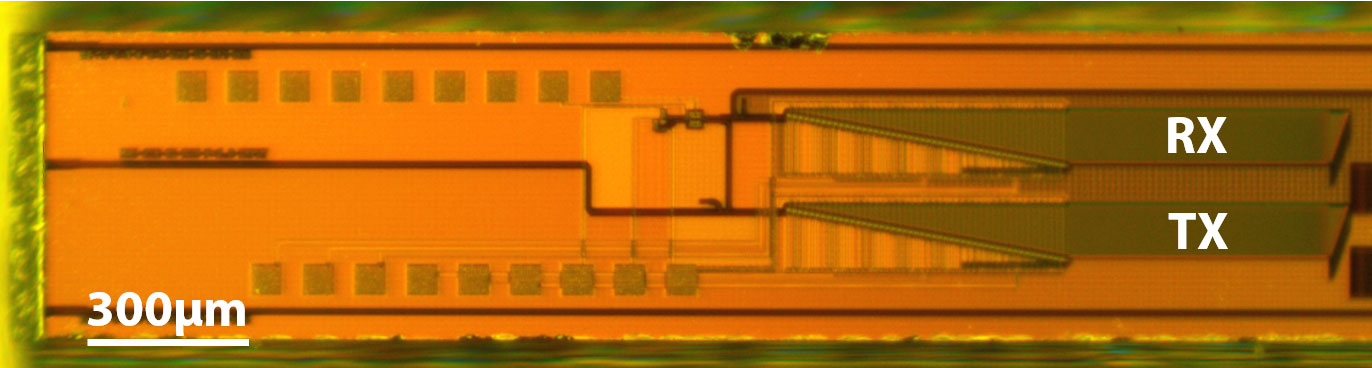
光学显微照片显示麻省理工学院的固体激光雷达,0.5毫米×6毫米的硅光子芯片与导向传输和接收相控阵天线和芯片上的锗探测器。
图片来源:Christopher V. Poulton
那么下一步是什么?很明显,大量的工作仍然需要做的,一些材料的创新可以带来更长的探测范围和更高的横向分辨率。研究人员将探索如何均匀和精确的控制硅波导,这种技术随着光敏技术的提高将不断提升。DARPA(美国国防高级研究计划局)已经启动了一项计划,旨在支持这项硅光子激光雷达工作。如果成功的话,这些芯片可以突破目前自动驾驶汽车和机器人面临的障碍。当然,对于关注3D打印的业界来说,毫无疑问这项技术将改变三维扫描,只是时间早晚的问题。
版权声明©3D科学谷
网络转载必须注明来源3D科学谷
网站投稿请发送至editor@51shape.com














